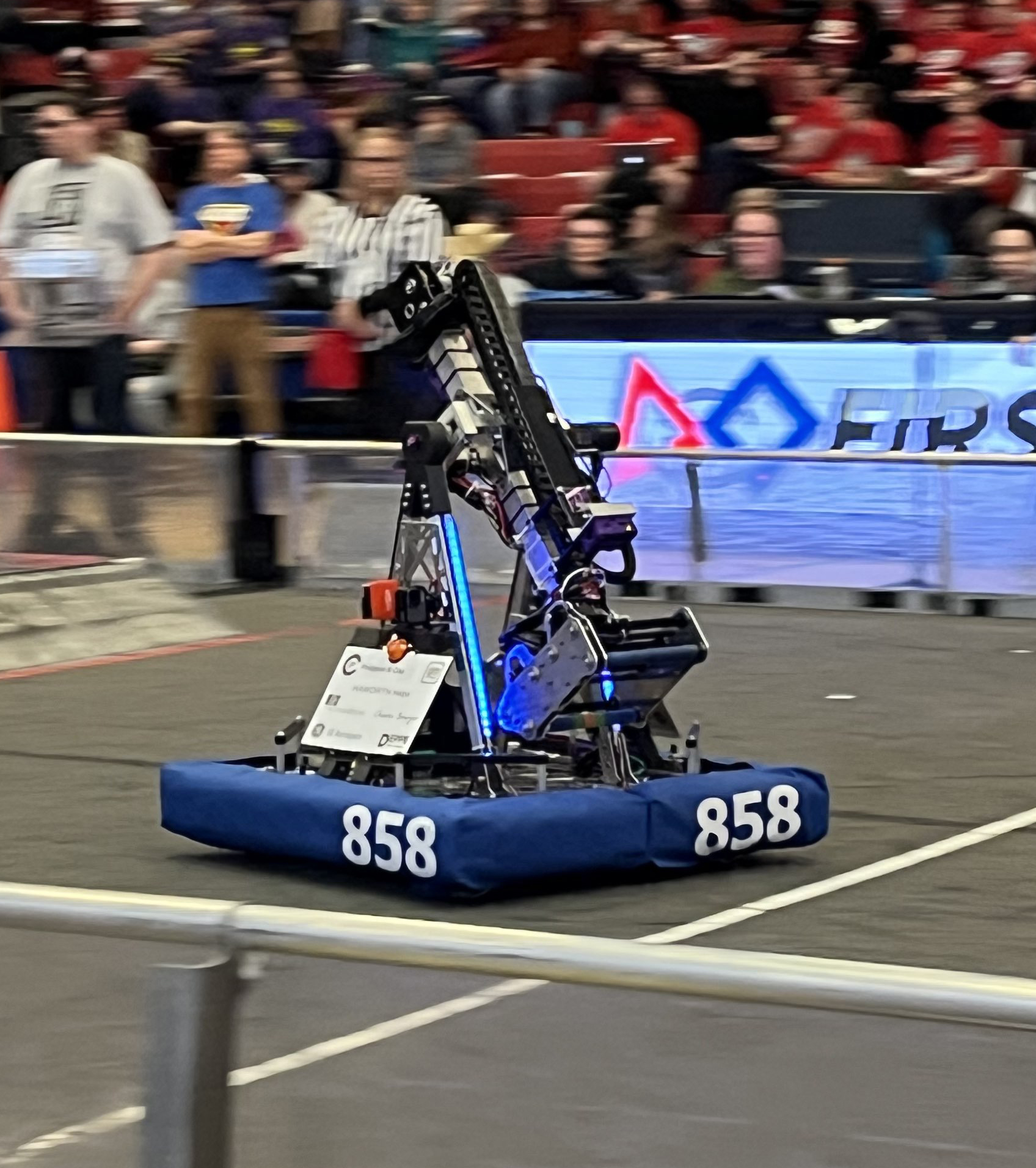
2025 - ReefScape
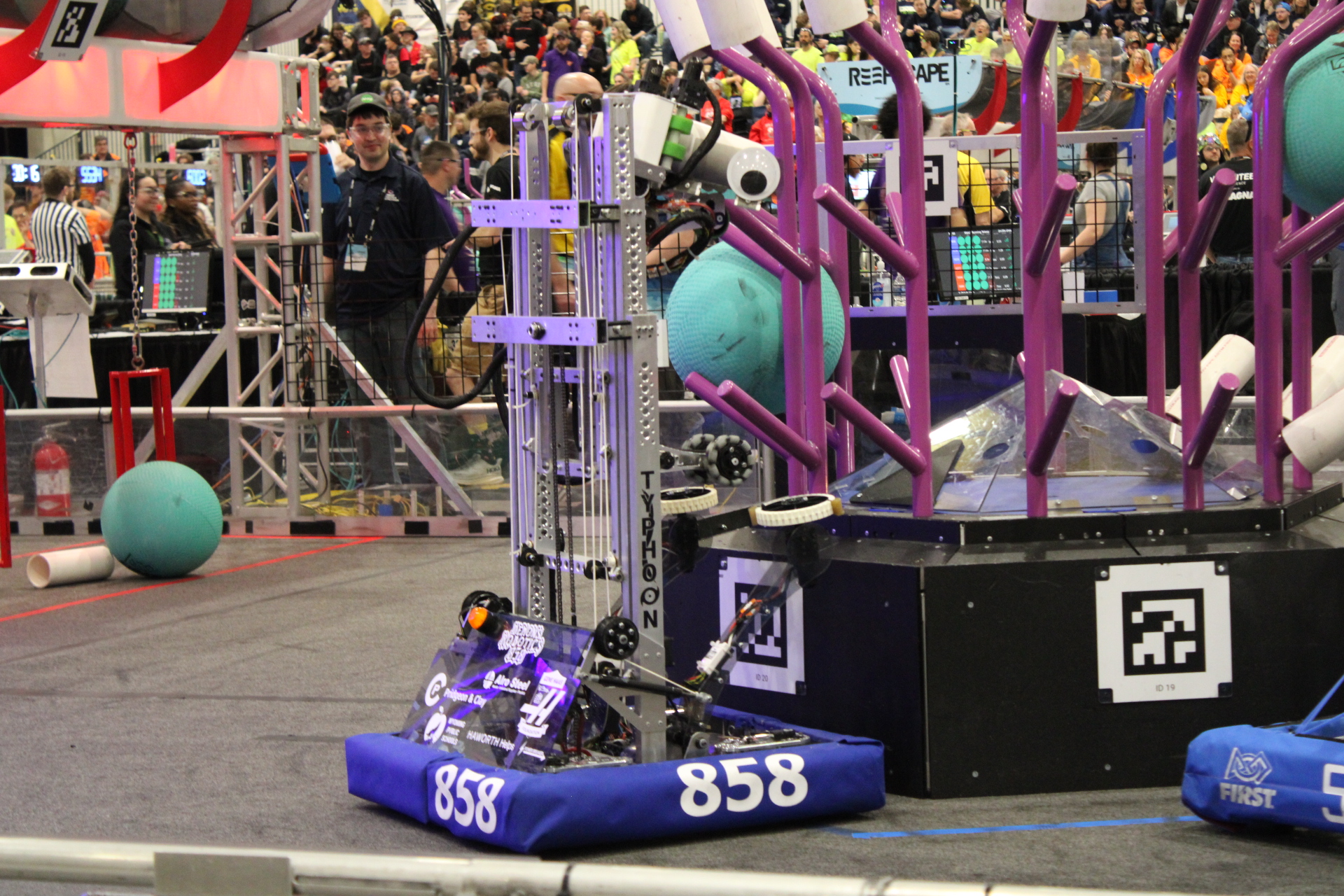
This robot was deisnged to do both Algae and Coral tasks. We had a superior algae system, which allowed for fast and easy pick and placement into the barge. Both our algae and coral system was built onto an elevator and a cam that would rotate for intaking the algae or coral.
| Drive Type | Swerve Drive |
| Game Element Effector | Ground Algae (Ball) Intake, Human Player Coral (Tube) Intake, Elevator Algae and Coral Dispence |
| Coded In | Java |